You are here
Praktikumsprotokoll Elastizitätsmodul
Dieses Praktikumsprotokoll entstand während meines Physikstudiums im Rahmen des Moduls C-Praktikum. Es wurde von meinem Praktikumspartner und mir erstellt, wobei mein Kommilitone nicht namentlich genannt werden möchte. Das Protokoll wurde zwar testiert, es können sich allerdings dennoch inhaltliche oder grammatikalische Fehler darin befinden. Sollte jemand solche Fehler finden, wäre ich froh wenn er sie mir mitteilt.
Elastizitätsmodul
Inhaltsverzeichnis
1.1. Elastizitätsmodul und Spannungen
1.3. Spannungs-Dehnungs-Diagramm
2. Durchführung und Auswertung
2.1. Bestimmung der Balkenabmessungen und Massen
2.2. Bestimmung der Elastizitätsmodule
1.1. Elastizitätsmodul und Spannungen
Der Elastizitätsmodul E, ist die Proportionalitätskonstante im Hookeschen Gesetz:
(1.1.1)
und wird mit den Einheiten angegeben. ist dabei die relative Dehnung, welche die durch die Krafteinwirkung erzeugte relative Längenänderung in % angibt. Und stellt die Spannung bei Zug, Druck oder Biegung dar. Der Torsionsmodul G, auch Schubmodul genannt, ist eine Materialkonstante und gibt Auskunft über die elastische lineare Verformung eines Bauteils, infolge einer Scherkraft oder Schubspannung. Es wird ebenfalls mit der Einheit angegeben. Die dabei am Bauteil auftretenden Spannungen sind die Scher- und Torsionsspannung. Sowohl die Zug-, als auch die Druckspannung wirken senkrecht auf ein Bauteil. Wobei bei der Druckspannung das Bauteil von oben und unten zusammengedrückt wird, während es bei der Zugspannung auseinander gezogen wird. Eine Biegung hingegen kommt dann Zustande, wenn mindestens eine der beiden Enden eines Bauteiles gekrümmt wird. Dabei treten immer Druck- und Biegespannungen im Bauteil auf. Bei der Torsionsspannung hingegen, wird das Bauteil, meistens kreisförmig, an seinen Enden befestigt und anschließend wie eine Schraube gedreht. Die Scherspannung erfolgt durch die Belastung mit zwei äußeren Kräften, welche senkrecht zur Längsachse des Teils wirken. Oftmals wird der Werkstoff beim Abscheren mit weiteren Spannungen belastet, was für die Berechnung aber vernachlässigt werden kann, da diese Beeinflussung nur minimale Abweichungen erzeugt. Für eine grafische Darstellung der einzelnen Spannungsarten, siehe auch die Abbildung 1. Weiterhin ist es möglich die auf einer Fläche wirkenden Kräfte in eine parallel wirkende Kraft und eine senkrecht wirkende Kraft aufgeteilt werden. Bei einer senkrechten Krafteinwirkung, wie beispielsweise bei Zug- oder Druckspannung, gilt zu ihrer Berechnung die Gleichung:
(1.1.2)
bei der A für die Fläche, auf der die Kraft wirkt, für die Zugspannung und für die Druckspannung steht. Bei der parallelen Kraft hingegen verwendet man die Formel:
(1.1.3)
wobei für die Schub- oder Tangentialspannung steht.
Der Grund für die elastische Verformung liegt auf der atomaren Ebene. So lange keine äußeren Kräfte auf das Material wirken befinden sich die einzelnen Atome, welche innerhalb des Stoffes in einem festen Raumgitter angeordnet sind, in einer stabilen Gleichgewichtslage. Wirkt allerdings eine Kraft von außen, werden die Atome an der Oberfläche aus der Gleichgewichtslage geschoben. Die verschobenen Oberflächenatome treffen dann auf ihre Nachbaratome und verschieben diese ebenfalls, was dadurch zu einer Verformung des gesamten Materials. Dabei ist die Verformung nicht dauerhaft, so lange nicht eine materialspezifische Kraft überschritten wird, was nach der Entlastung dazu führt, dass der Körper sich zurück in seine Gleichgewichtslage bewegt. Bei einem Überschreiten dieses Kraftwertes führt dies zu einer dauerhaften Verformung, da sich die Atome in eine neue Gleichgewichtslage begeben. Die relative Ausdehnung kann dabei mit der folgenden Gleichung berechnet werden:
(1.2.1)
wobei l der Ausgangslänge und der Längenänderung entspricht.
1.3. Spannungs-Dehnungs-Diagramm
Wenn man nun die relative Ausdehnung und die auftretende Spannung im Verhältnis zueinander aufträgt, dann erhält man das sogenannte Spannungs-Dehnungs-Diagramm. Dabei gilt für den linearen Bereich am Anfang des Diagramms das Hookesche Gesetz. Dies ändert sich aber mit dem Erreichen der Proportionalitätsgrenze, ab der die relative Längenänderung schneller ansteigt als die Spannung. Allerdings begibt sich der Körper, bei Entfernung der wirkenden Kraft, immer noch in seine ursprüngliche Form zurück. Erhöht man nun allerdings die Belastung auf den Körper weiter, dann erreicht man die Elastizitätsgrenze, ab der die dauerhafte plastische Verformung des Körpers beginnt und die ursprüngliche Körperform, auch nach dem Entfernen der Spannung, nicht mehr eingenommen wird. Lässt man die wirkenden Kräfte nun noch weiter steigen, dann gelangt man zur Fließgrenze, ab der die erforderliche Spannung wieder abnimmt. Grund für die Abnahme ist die bereits erfolgte, deutliche Veränderung der inneren Körperstruktur. Eine weitere Erhöhung der einwirkenden Kraft würde dann zu einer immer stärkeren und unumkehrbareren Verformung und schließlich zu einem Bruch führen.
Beim Verbiegen eines Balkens wird seine untere Seite gestaucht und damit verkürzt. Seine obere Seite hingegen wird gestreckt und dadurch verlängert. In der Mitte des Balkens findet weder eine Stauchung, noch eine Streckung statt. Grund dafür ist, dass die wirkenden Zug- und Druckkräfte sich hier aufheben und praktisch keine Spannung herrscht. Diese Linie nennt man auch neutrale Faser und sie wird berechnet mit der Gleichung:
(1.4.1)
wobei l für die Länge, r für den Krümmungsradius und für den Winkel stehen. Weiterhin muss darauf geachtet werden, dass zur Berechnung der Unter- oder Oberkante der Radius der Krümmung um , wobei d für den Balkendurchmesser steht, verkürzt oder verlängert werden muss. Nun kann man den Wert der Längenänderung des Balkens berechnen und zwar mittels der Formel:
(1.4.2)
dabei steht z für den Abstand zur neutralen Faser. Um die nun auftretende Zugspannung zu berechnen, fügt man die Gleichungen (1.1.1), (1.2.1) und (1.4.2) zusammen und erhält so:
(1.4.3)
Möchte man stattdessen die wirkende Druckspannung berechnen, dann verwendet man dieselbe Formel, setzt aber ein negatives Vorzeichen voran, da diese Kraft in die Gegenrichtung wirkt.
(1.4.4)
dabei steht b für die Balkenbreite. Daraus erhält man nun ein Drehmoment, welches wie folgt berechnet werden kann:
(1.4.5)
Nun erhält man, durch eine Integration über die gesamte Balkenhöhe, die Gleichung:
(1.4.6)
Wenn man nun eine beliebige Stelle x des verbogenen Balkens betrachtet, so erkennt man, dass dort ebenfalls eine Drehmoment durch die wirkende Kraft erzeugt wird. Man kann dieses berechnen mittels der Formel:
(1.4.7)
Setzt man nun 1.4.6 und 1.4.7 gleich, so kann man die Balkenkrümmung, in Abhängigkeit von x, berechnen mittels:
(1.4.8)
Eine zweite Möglichkeit eine Durchbiegung von Körper zu errechnen, ist mittels des Flächenträgheitsmomentes I, welches wie folgt definiert ist:
(1.4.9)
dabei steht y für die Richtung in welche die wirkende Kraft zeigt und für einen festgelegten Balkenquerschnitt. Für einen Balken mit der Dicke d, der Breite b und einseitiger Einspannung erhält man dann beispielsweise:
(1.4.10)
und für die Balkenkrümmung erhält man dann die Gleichung:
(1.4.11)
Möchte man aber, wie in diesem Versuch, die Durchbiegung eines beidseitig eingespannten, beziehungsweise aufliegenden, Balkens, welche exakt in der Mitte durchbogen wird, errechnen, so muss man noch beachten, dass dadurch aus F und L, und wird. Setzt man dies nun in Gleichung (1.4.8) ein, so erhält man:
(1.4.12)
Weiterhing ergibt sich die Kurvenkrümmung wie folgt:
(1.4.13)
Man kann diese Gleichung, für eine Durchbiegung von , nun vereinfachen zu:
(1.4.14)
Wenn man jetzt erneut integriert, so bekommt man die Formeln:
(1.4.15)
(1.4.16)
(1.4.17)
wobei und für beliebige Konstanten stehen und es gilt weiterhin:
(1.4.18)
Durch den Versuchsaufbau sind außerdem folgende Bedingungen bereits gegeben:
(1.4.19)
dabei ist s der sogenannte Biegepfeil, jener Wert, um der der Balken in der Mitte gebogen wurde. Des Weiteren erhält man aus diesen Bedingungen die Werte der Konstanten und , welche sich folgendermaßen verhalten:
(1.4.20)
Mit (1.4.19) und (1.4.20) folgt dann direkt:
(1.4.21)
Und man erhält somit die folgende Gleichung für w:
(1.4.22)
wobei für die Gewichtskraft, für die Gesamtmasse und g für die Erdbeschleunigung steht. Dadurch lässt sich nun der Elastizitätsmodul bestimmen mit der allgemeinen Gleichung:
(1.4.23)
2. Durchführung und Auswertung
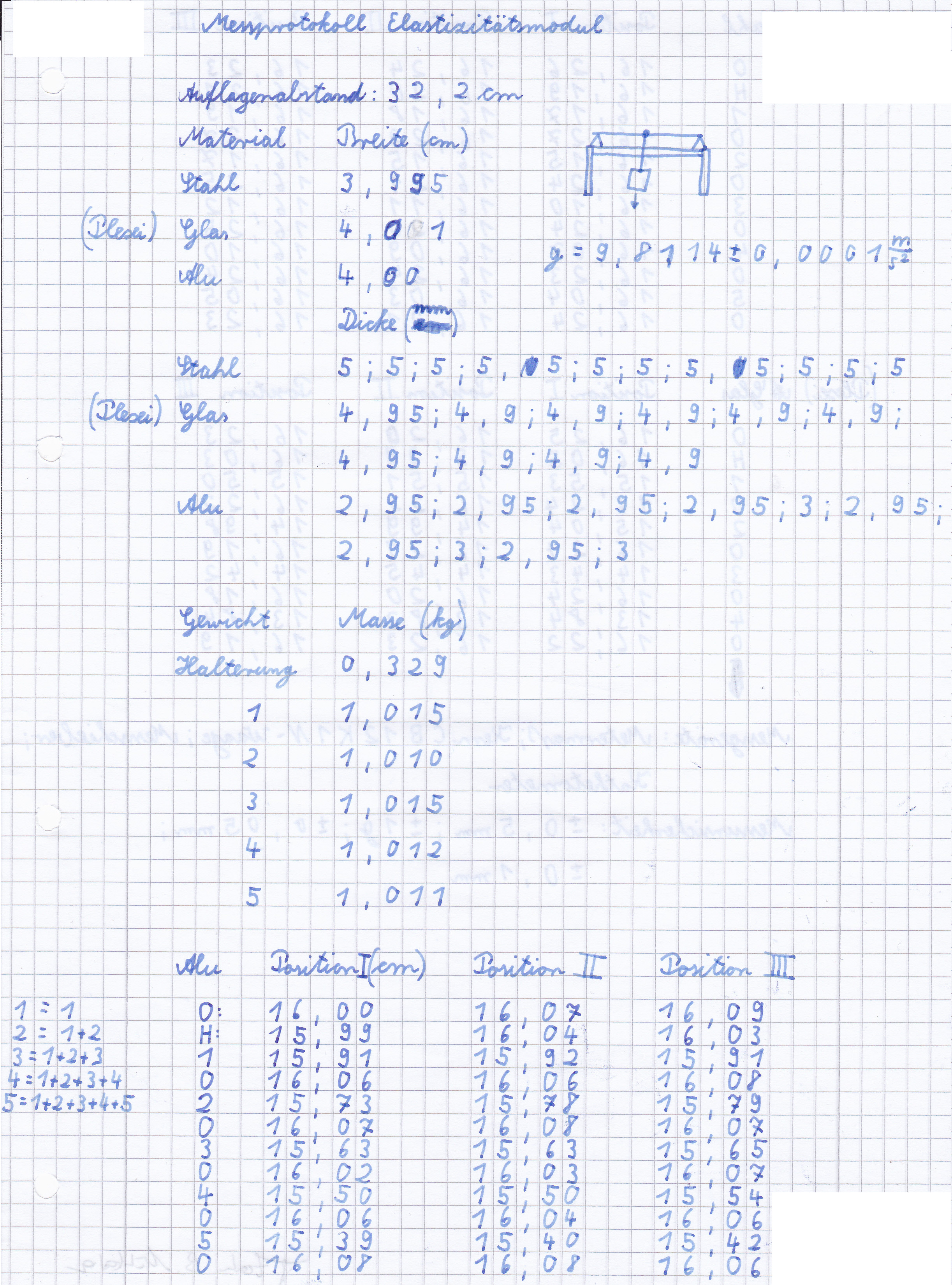
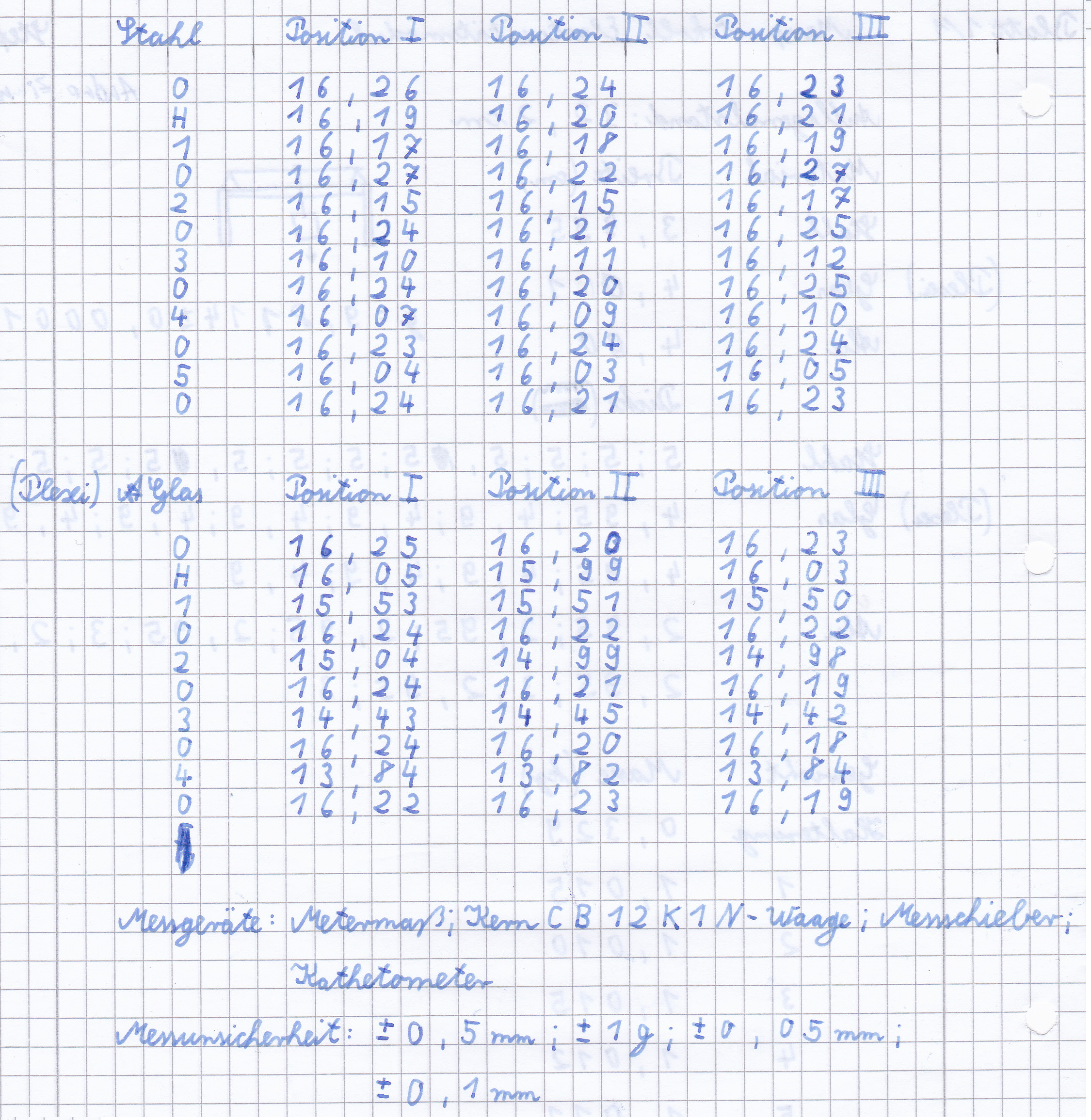
Ziel dieses Versuches ist es die Elastizitätsmodule von den im Versuch vorliegenden Balken aus, Stahl, Plexiglas und Aluminium zu bestimmen. Als erstes wurde der Balken aus Aluminium auf die Auflage so aufgelegt, dass er mit der gesamten Breite auf beiden Auflagepunkten auflag. Dann wurde das Kathetometer mit dem Fadenkreuz auf die Oberkante des Balkens ausgerichtet und der Wert an der Skala des Kathetometers abgelesen und notiert. Dann wurde die Halterung der Gewichte an der Mitte des Balkens angehängt und erneut mit dem Kathetometer die Oberkante des Balkens anvisiert und der entsprechende Wert notiert. Anschließend wurde in einzelnen Schritten jeweils ein Gewicht mehr angehängt und zwischen jedem Gewicht wieder die Nulllage bestimmt. Diese Messreihe wurde jeweils dreimal für jeden Balken wiederholt, bei Plexiglas wurde das letzte Gewicht jedoch nicht angehängt.
2.1. Bestimmung der Balkenabmessungen und Massen
Um in diesem Versuch die Elastizitätsmodule von Stahl, Plexiglas und Aluminium zu bestimmen, müssen zunächst die Abmessungen der verwendeten Balken bekannt sein. Für die Länge der Balken L wird nur die relevante Länge, also der Abstand der zwei Auflagepunkte mit einem Metermaß gemessen zu und ist somit für alle 3 Balken identisch. Die Breiten der Balken b wurden mit einem Messschieber zu , und gemessen. Die Dicken der Balken d wurden jeweils zehnmal, ebenfalls mit dem Messschieber gemessen und anschließend der Mittelwert gebildet. Für die Gesamtfehler der Mittelwerte werden zu dem systematischen Fehler von der jeweiligen zweifachen Standardabweichung des Mittelwerts addiert. Damit ergeben sich folgende Balkendicken:
Des Weiteren wurden die Massen m der an die Balken angehängten Halterung und Gewichte gemessen zu:
Die Gewichte wurden immer in derselben Reihenfolge angehängt, sodass sich folgende Gesamtmassen für Halterung mit 0, 1, 2, 3, 4 und 5 Gewichten ergeben:
Für die Erdbeschleunigung wurde der im Raum ausgehängte Wert für Kassel von verwendet.
2.2. Bestimmung der Elastizitätsmodule
Mit einem Kathetometer wurden für jeden Balken nun mehrfach die Nulllage und die Auslenkung für jede der zuvor genannten Gesamtmassen gemessen, bei Plexiglas wurde das letzte Gewicht allerdings nicht angehängt, da die Verformung sonst den elastischen Bereich verlassen hätte. Aus der Differenz von Nulllage und Auslenkung erhält man den Biegepfeil s, dessen Werte gemittelt wurden und im folgenden Diagramm über die angehängten Massen aufgetragen wurden. Mit Ausgleichsgeraden erhält man die Steigung m, welche entspricht.

Abbildung 1: Biegeverlauf
Formel (1.4.23) lässt sich nun umstellen zu
und der Fehler von E wird berechnet durch
Hier beispielhaft für Stahl:
Daraus ergeben sich nun folgende Werte für die Elastizitätsmodule:
Die Literaturwerte für E lauten:
, und [6]
Der experimentell bestimmte Wert für Plexiglas ist konsistent mit dem Literaturwert, der Wert von Aluminium weicht nur leicht ab, der Wert für Stahl kann jedoch scheinbar nicht stimmen, was auf größere unentdeckte Fehler hinweist. Das Fadenkreuz des Kathetometers war zu Beginn des Versuchs schon nicht parallel zu der Balkenoberkante ausgerichtet, hierdurch könnten Ablesefehler entstanden sein. Da Stahl als letztes gemessen wurde könnte es möglich sein, dass während des Versuches etwas an der Versuchsanordnung verschoben wurde, ohne dass dies bemerkt wurde, wodurch Kathetometer und Balken nicht mehr richtig zueinander ausgerichtet waren, was die große Abweichung erklären könnte.
In diesem Versuch wurden die Elastizitätsmodule von Stahl, Plexiglas und Aluminium bestimmt zu:
- Agerer, M. S. (kein Datum). Maschinenbau-Wissen. Abgerufen am 9. September 2014 von Maschinenbau-Wissen: Maschinenbau-Wissen.de
- Demtröder, W. (2013). Experimentalphysik 1 - Mechanik und Wärme (6., neu bearbeitete und aktualisierte Ausg.). Springer-Verlag.
- Fischer, U., Gomeringer, R., Heinzler, M., Kilgus, R., Näher, F., Oesterle, S., et al. (2008). Tabellenbuch Metall (44., neu bearbeitete Ausg.). Haan-Gruiten: EUROPA LEHRMITTEL.
- Goethe-Universität Frankfurt am Main. (13. Mai 2015). Abgerufen am 13. Mai 2015 von Goethe-Universität Frankfurt am Main: https://elearning.physik.uni-frankfurt.de/data/FB13-PhysikOnline/lm_data...
- Hohenstein, J., Ignatowitz, E., Köhler, D., Köhler, F., Mahr, G., Pahl, H.-J., et al. (2007). Tabellenbuch für Metallbautechnik (5. erweiterte Ausg.). Haan-Gruiten: EUROPA LEHRMITTEL.
- Kuchling, H. (2014). Taschenbuch der Physik (21. Auflage Ausg.). München: Carl Hanser Verlag.
- RWTH Aachen University. (13. Mai 2015). Abgerufen am 13. Mai 2015 von RWTH Aachen University: http://web.physik.rwth-aachen.de/~hebbeker/lectures/ph1_0102/p112_l04/p1...
- Tipler, P. A., & Mosca, G. (2009). Physik (6. Ausg.). Springer-Verlag.
- Log in to post comments
Neueste Kommentare